產品資訊
產品資訊

多自主載具研究室 Autonomous Vehicles Research Studio
產品型號:
廠牌名稱: QUANSER
Quanser多自主載具研究室 Autonomous Vehicles Research Studio是一個集合無人飛行器QDrone 2和地面移動機器人QBot 3為一體的多目標教學和研發平台。目前許多研究人員由於受到採用不同軟硬體的無人載具制約無法進行不同載具之間的協調控制等方面的研究。Quanser多自主載具研究室為廣大研究人員提供了一個實現多自主載具協調控制研究系統,可以很方便地將自己的控制器和算法透過這個平台工具進行實現及驗證。




產品特點
SIMULINK參考資料(若連結失效請至QUANSER頁面下載)
在可控的室內環境下進行實驗的驗證
透過多個紅外線攝影機實現三維空間定位
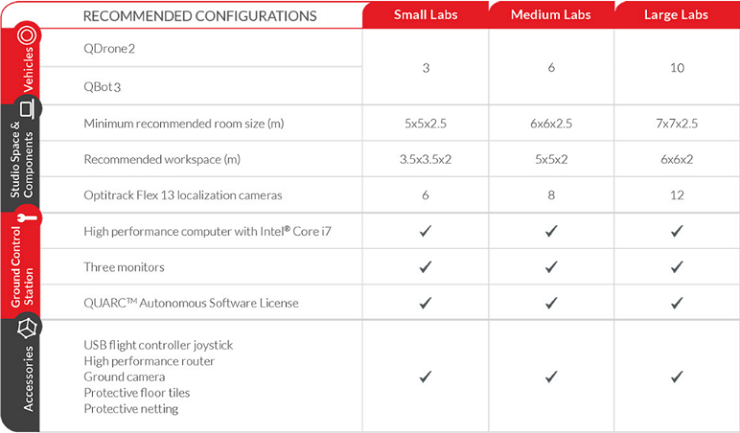
根據研究需求,可進行多種搭配組合,以下為推薦搭配
參考影片
影片為早期版本,展示設備為QDrone與QBot 2e
應用領域
無人載具的動態建模和控制研究
運動規劃
避障控制
機器視覺
機器學習
多信息融合
編隊控制
地空協同控制
無人載具自主控制
視覺SLAM
感應器網絡
群控策略
研究論文
近期論文
Rapalski, A.; Dudzik, S. Energy Consumption Analysis of the Selected Navigation Algorithms for Wheeled Mobile Robots. Energies 2023, 16, 1532. https://doi.org/10.3390/en16031532
Matthews, Mackenzie Truman (2021). Adaptive and Neural Network Based Control of Unmanned Aerial Vehicles. North Carolina Agricultural and Technical State University ProQuest Dissertations Publishing,2021. 28415401.
G. Bitencourt, E. Brown, C. Bleimnling, G. Lai, A. Molki and T. Kaya, "Autonomous Aerial Vehicle Vision and Sensor Guided Landing," 2021 IEEE International Conference on Electro Information Technology (EIT), Mt. Pleasant, MI, USA, 2021, pp. 097-100, doi: 10.1109/EIT51626.2021.9491843.
A. Saleem et al., "Detection of Oil Spill Pollution in Seawater Using Drones: Simulation & Lab-based Experimental Study," 2021 IEEE International IOT, Electronics and Mechatronics Conference (IEMTRONICS), Toronto, ON, Canada, 2021, pp. 1-5, doi: 10.1109/IEMTRONICS52119.2021.9422576.
Hayajneh, M. Experimental validation of integrated and robust control system for mobile robots. Int. J. Dynam. Control 9, 1491–1504 (2021). https://doi.org/10.1007/s40435-020-00751-7