PRODUCT
首頁
產品資訊
PRODUCT
首頁
產品資訊






產品特點
SIMULINK原文課程(若連結失效請至QUANSER頁面下載)
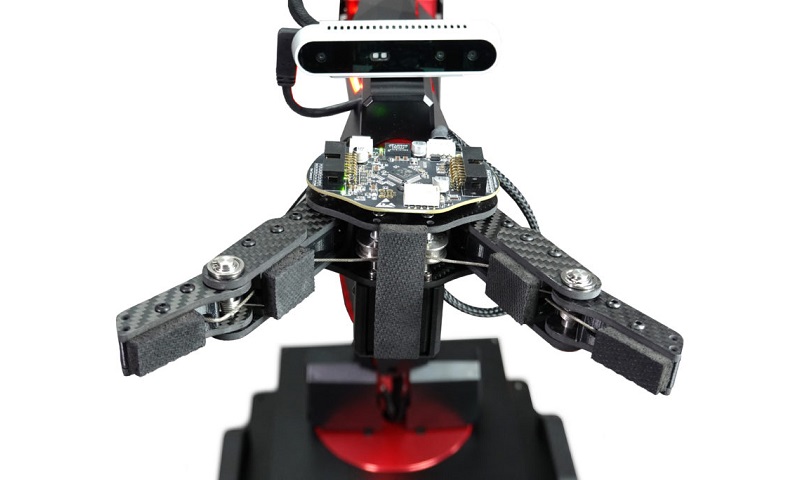
Quanser的QArm是一種4自由度機械手臂,具有基於肌腱的兩段式夾爪和RGBD攝影機,專為現代工程教育和學術研究應用而設計。
藉由Simulink®的直觀圖形界面或Python™和ROS的可擴展性,學生可以有系統地學習各種機器人概念,包含關節控制、運動學、路徑規劃、靜態和動態等。
QArm提供了詳盡的課程資源,激起學生的興趣並為提供他們進行互動挑戰的基礎知識。另有提供課程地圖以將QArm課程對應到到現行的教科書中。
QArm的開放體系結構設計使研究人員可以使用自定義和內部控制方案,在機器學習、輔助機器人、協作機器人等領域快速地開發和部署應用程式。
- 機械手臂由4個關節組成,提供了較大的可動範圍。
- 兩階段的五點接觸式夾爪可以和各種形狀的物體互動,同時通過電流感測來衡量抓取力道。
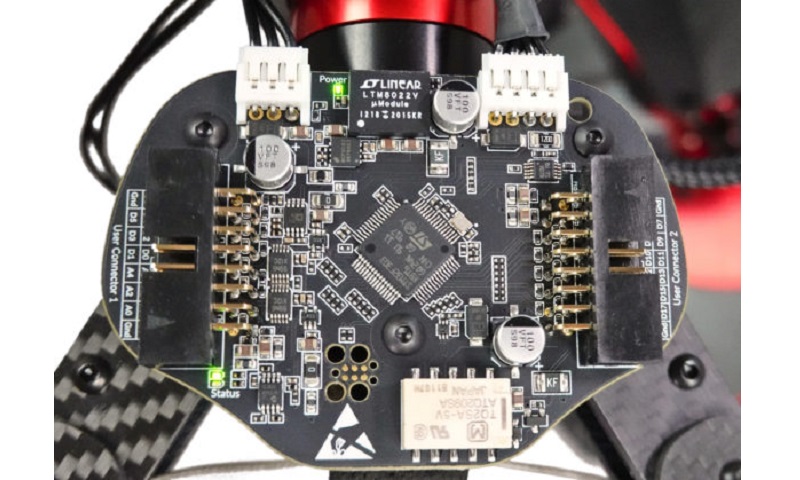
- 可以透過額外的感應器和執行器來對夾爪進行擴展和客製化。
- RGBD攝影機的位置使您可以執行檢查和視覺伺服任務。
- 非常適合適應未知環境並從中學習。
- 兩種接口選項(擇一)允許QArm透過USB連接電腦,或連接至微控制器(例如Raspberry Pi)進行控制。
產品規格
| 機械手重量 | 8.25 kg |
| 有效負載 | 350-750 g |
| 觸及距離 | 750 mm |
| 重複性 | ± 0.05 mm |
| 攝影機 | Intel® RealSense™ D415 |
| 接口 | USB (QFLEX 2) |
| 界面控制方式 | Position mode, Current mode |
| 外部控制率 | 500 Hz |
| 可擴展的I / O | PWM/Analog/I²C/SPO/UART |
| 最小和最大關節範圍 | 基準:±170° 肩部:±85° 肘部:-95°/ + 75° 手腕:±160° |
| 最大關節速度 | ± 90°/s |
應用領域
機器人