PRODUCT
首頁
產品資訊
PRODUCT
首頁
產品資訊




產品特點
SIMULINK原文課程(若連結失效請至QUANSER頁面下載)
LABVIEW原文課程(若連結失效請至QUANSER頁面下載)
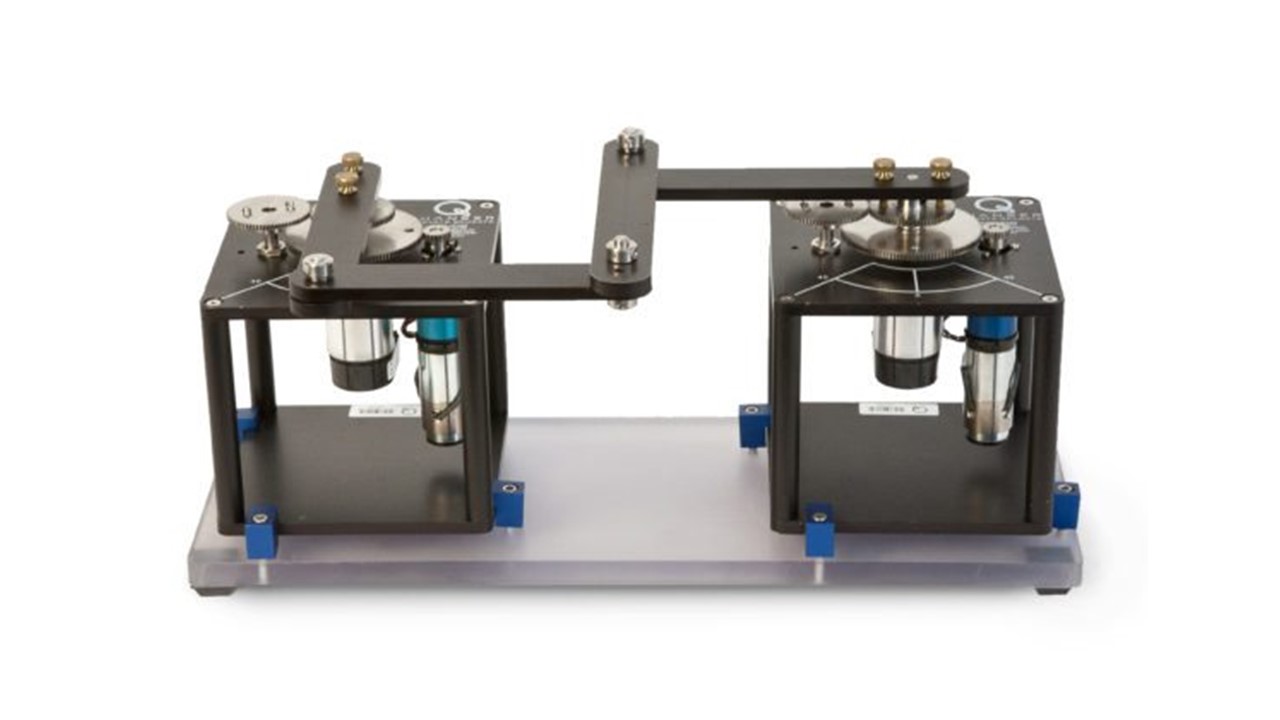
- 鋁製的四連桿系統
- 可安裝二自由度倒立擺模塊擴展實驗
- 模塊易於固定到旋轉伺服
- 易於連接的線纜和連接器
- 完全兼容MATLAB/Simulink和LabVIEW
- 全面的系統模塊文件以及MATLAB/Simulink,LabVIEW和Maple的參數設置
- 開放式結構設計,可以自己設計控制器
產品規格
|
四連桿模塊重量
|
0.335 kg
|
|
單個連桿重量
|
0.065 kg
|
|
單個桿長
|
0.127 m
|
|
齒輪轉動慣量
|
8.74 × 10 - 5 kg.m 2
|
|
樞軸轉動慣量
|
3.49 × 10 -4 kg.m 2
|
|
設備整體尺寸(長×寬×高)
|
40 cm × 30cm × 20 cm
|
|
機器人總重量
|
4.0 kg
|
應用領域
控制系統
機器人
研究論文
近期論文收集
Chan-Zheng, C.; Borja, P.; Scherpen, J.M.A. Tuning Rules for a Class of Passivity-Based Controllers for Mechanical Systems. IEEE Control Systems Letters (2021)
Nihad Ali, Yasar Ayaz, and Jamshed Iqbal.Collaborative Position Control of Pantograph Robot using Particle Swarm Optimization.Journal Proceedings: International Journal of Control, Automation and Systems(2016)